Advantages:
- no loss of position when Gecko drive faults
- maintain position reference in both CNC and manual operation
- powers Gecko drives on and off, senses fault from drives
| |
Advantages:
|
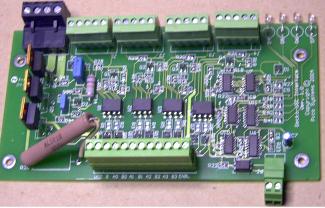
| The Pico Systems Gecko Interface is designed specifically for use with
the Gecko 320 and 340 servo drives. Its main purpose is to provide encoder
information to BOTH the Pico Systems Universal Stepper Controller AND up
to 4 Gecko servo drives. The encoder is powered from the USC board, so
encoder power is constant, whether the Gecko drives are on or off. The
encoder signals are sent to the Gecko drive(s) through an opto-isolator,
to prevent signal corruption from ground loops.
In addition to making a 'copy' of the encoder signals, it also senses when any Gecko drive goes into the fault condition, and provides an emergency-stop signal to the USC. It records which axis has faulted, and then powers the Gecko drives down. The same happens if the USC board commands going to E-stop. When coming out of E-stop, the Gecko drives are reset. When in the E-stop condition, a braking resistor is applied to all the Gecko drives. The Gecko Interface is a 5.75 x 3&ldquo circuit board. The advantages of providing encoder information all the way back to the CNC computer is that position can be monitored not only in CNC mode, but when manual movement is made, too. In that case, the CNC computer becomes a true DRO, showing actual position at all times, even when the Gecko drives are off. Pico Systems is currently delivering this board at an end-user cost of US $100. Connector Pinouts for the Gecko Interface board
Sample wiring of the Gecko Interface board Dimensional drawing of the Gecko Interface board Please note Gecko is a trademark of Geckodrive, Inc., http://www.geckodrive.com/products.html |
You can contact Pico Systems at :
(314) 965-5523
or
543 Lindeman Rd.
Kirkwood, MO 63122
or
elson@pico-systems.com