|
Home-Brew Shaft Encoders for the Pittman GM8712
Gearhead Motor
Pittman GM8712-31 19.1 V.DC Gearhead Motor
Some nice small DC gearhead motors recently appeared on the
electronic surplus market, suitable for jack-rabbit size hobby
robots of 5 or 10 pounds. These motors are manufactured by Pittman,
model number GM8712. BGMicro and Tanners, two surplus houses in
Dallas, stocked a few gross of these and sold them for $10.95
apiece. They were snatched up quickly by the membership of the
Dallas Personal Robotics Group, though I believe a few are still
available. Apogee appears to sell the same motor for $15. Check out:
http://www.apogeeinc.com/mfg.html
Eric Yundt of the DPRG reports that Automation Solutions has these
gearmotors (new?) listed for a cool $73.90 a pop.
Surplus DC gearhead motors suitable for hobby robots are very
much "Targets of Opportunity." It is difficult to find the desired
combination of characteristics: voltage, stall current, gear ratio,
size, encoder resolution , noise levels, and of course cost. These
particular Pittman motors are ideal in many ways for our purposes
but lack shaft encoders. This article describes a simple method for
constructing home-brew encoders for these nifty little motors. It
arose from a series
of email postings on the Dallas
Personal Robotics Group (DPRG) mailing list and The Seattle
Robotics Society (SRS) mailing list, and quotes freely from those
postings.
Many thanks to all the conglomerated brain power that went into
this simple modification.
I. The Motors
Eric provided us with a synopsis of the
motor's specifications, along with CAD drawings and dimensions of
the motor
(DWG,
DXF)
itself and dimensions for a motor
mount (DWG, DXF).
Eric's synopsis:
The spec sheet says of the 19.1V GM8712
gearmotor, with a 60.5:1 reducing gearbox:
Gearmotor Data:
- Gearbox Efficiency 66%
- No-load Speed 128 RPM
Motor Data:
- Continuous Torque (Max) 1.3 oz-in
- Peak Torque (Stall) 5.1 oz-in
- No-load Speed 7729 RPM
Winding Data:
- Torque Constant 3.06 oz-in/A
- Resistance 10.80 Ohms
- No-load Current 0.14 A
- Peak Current (Stall) 1.76 A
Eric continues: I take all that to mean (in theory) out the
gearbox shaft:
- Continuous Torque (Max) 1.3 oz-in * 60.5:1 * 66% = 51.9 oz-in
- Peak Torque (Stall) 5.1 oz-in * 60.5:1 * 66% = 203.6 oz-in
Alan Bredon reports that Pittman specs two basic gearbox torque
ratings: 500 oz-in for the larger type, and 200 oz-in for the
smaller. The latter is in good agreement with Eric's calculations.
These motors seem to work nicely at 12V running about 70 RPM with a
stall current around 1A . That is low enough to use common H-bridge
driver chips like the L293 used by the Handy Board, EyeRobot
controller, MicroCorp controller, M.I.T. 6.270 board, and similar
small to mid-sized robot controller boards.

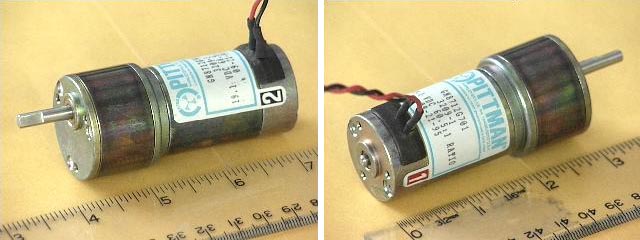
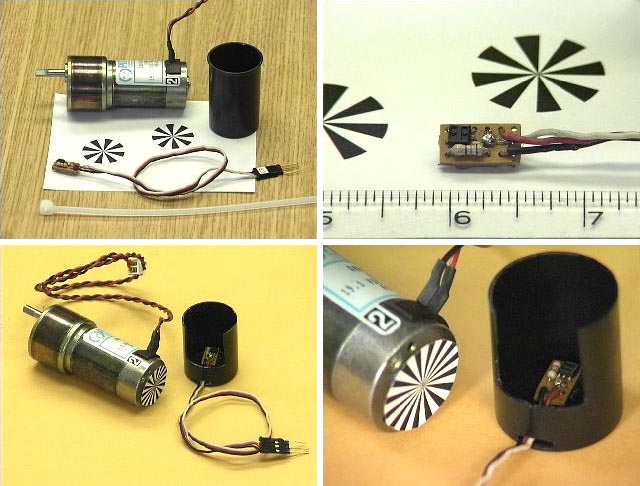
Pittman GM8712 disassembly of motor and
gearhead
I took two of the Pittman GM8712 motors out to the lake-side
retreat of Michael Hamilton, aircraft engineer and designer
extraordinare for Traxxus (toy cars) et al. We took one apart and
played with it. He pronounced it "first rate stuff."
It is a seven pole motor, which accounts for the high torque at
low rpm and for it's extremely quiet operation, always a plus for
domestic robots. Notice in the upper right-hand image that the seven
poles are wound with lots of extremely fine wire (we measured 12
ohms). The poles are also "skewed" helically. Michael tells me this
provides for smoother operation, as the poles "overlap" each
other.
The gearhead has 4 stages. We counted the teeth and the last
three stages have 32 tooth spur gears driven by 10 tooth pinions,
3.2:1 per stage. The first stage has slightly smaller teeth and we
were not able to count them. However, they must provide about 1.8:1
ratio for a final ratio of 60:1. All gears are "high quality" metal
gears with steel axles riding in bronze bushings.
Michael was of the opinion that we should probably not mount
wheels directly on the output shaft because of the small diameter of
the rear pin and bushing, as shown in the lower right hand picture
above. I said we were thinking of a 5 to 10 pound platform. He
suggest that someone suitably motivated could probably press out the
bronze bearings and replace them with ball bearings.
David Peterson dug through the Pittman web site and reported
similar findings. He quotes:
"Sleeve bearings are really not capable of supporting large
radial loads, and virtually no axial load. The actual radial
load capability depends on a number of factors, but is typically on
the order of a couple of pounds."
"We do offer ball bearings as an option on the output in place of
the sleeve bearing. This greatly increases the load capability.
Again, the exact values depend on a number of factors and are
somewhat subjective. For our standard ball bearing for this unit
type, we would typically recommend less than about 8 lbs radial load
and less than about 2 lbs axial load."
II. Home-brew Encoders
We have had good success in the
past with home-made encoders using paper wheels printed on a laser
printer and sensed with the Hamamatsu P5587 IR emitter/detector. My
last two robots have used this system with the encoder wheels simply
super-glued to the motor shaft. The paper disks are very light and
require no careful balancing to prevent vibration at high rpm. The
super-glue is much stronger than the paper itself and so provides a
robust means of attachment.
A. The Sensor
The Hamamatsu parts have proven very
reliable and easy to use. We have ordered them in the past directly
from Hamamatsu but they are also available from Zargos Robotics and
Acroname, whose web page includes a simple schematic:
Hamamatsu typical connections from Acroname
http://www.acroname.com/robotics/parts/R64-P5587.html
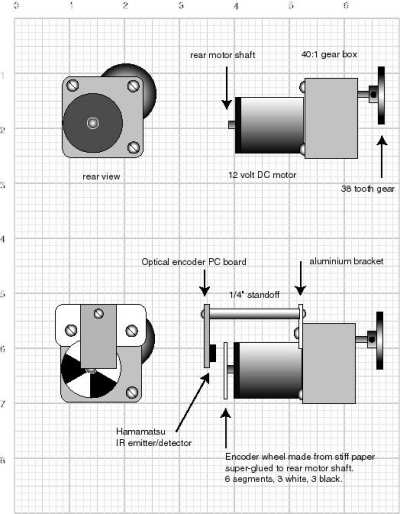
B. Mounting
My SR04
robot uses a similar method. On those motors the Hamamatsu sensor is
mounted on a small piece of perf-board which is attached to an
aluminum tube, itself attached to an aluminum bracket screwed to the
motor casing. These have worked reliably for about 4 years now, and
my initial reservations about using paper disks have been assuaged.
Disadvantages of this implementation are that it is not light-tight
and the paper disk is exposed to the clumsy hands of this robot
builder.
SR04's encoder disk
implementation.
Left Encoder disk and sensor on
SR04
Some improvements we wanted to make to this design for the
Pittman GM8712 motors were:
- A more easily adjustable mount for setting the sensor-to-disk
distance
- A light shield and protective cover for the paper disk and
sensor
- The ability to experiment with quadrature signals
- A simpler method of attachment
As we discussed the design options, Jeff Birt made the happy
discovery that a common black plastic 35mm film canister fits
perfectly over the case of the Pittman motors, with a small cutout
for the power connections. These can be held snugly in place with a
plastic cable tie. Mounting the Hamamatsu perf-board in the back of
the canister allows the spacing between the sensor and the encoder
disk to be adjusted simply by sliding the film can in and out.

C. Encoder segments
I am planning to run these motors
off 12 NMH cells, which works out to about 15 volts fully charged.
Working backward, the gearhead is spec'd at 128 rpm at 19.1 volts
and we measure about 70 rpm at 12 volts. That's something like 6 rpm
per volt, if the response is linear. So, 15 volts * 6 rpm/volt = 90
rpm. The gearhead has about a 60:1 ratio, so the motor speed at 15
volts would be: 90 rpm * 60 = 5400 rpm motor speed.
Or to put it another way: 5400 rpm / 60 seconds/minute = 90
revolutions per second.
My last generation of robots had a read-sensor-write-output cycle
time of 10 hz, or 100 milsec. That means the sample time for the
encoders is 100 milliseconds. For the current generation of
autonomous platforms I increased the rate to 20 hz, which is only a
50 ms sampling window. For the new mobile platform I'd like to
increase that again to 30 or 40 or perhaps even 50 hz, with
correspondingly shorter sample windows. A 50 hz update rate means
that if the robot is to measure motor velocities by counting how
many encoder ticks occurred in the previous sampling interval, we
only have 20 milliseconds to collect counts.
This number is needed to know how many encoder ticks are required
for smooth speed control, which in turn depends on the sampling
technique and the particular method of motor control. The SR04 robot
returns 1000 ticks per second per wheel at full speed. Since it's
update rate is 20 hz, that means 1000 ticks / 20 hz sample rate = 50
ticks per sample at full speed Slow speed is arbitrarily defined as
full speed / 10, so 50 ticks per sample full speed / 10 = 5 ticks
per sample, slow speed. For the speed control technique I am using,
5 ticks is close to a minimum number required for smooth speed
control.
To have this same granularity and resolution on the new platform
with a 50 Hz sample rate will require : 50 ticks/sample * 50
samples/second = 2500 ticks per second, full speed. 2500 ticks per
sec / 90 revs per second = 27.78 ~ 28 ticks per revolution.
So we need paper encoder wheels printed with 28 black and white
divisions. Empirical testing with the actual device determined that
20 segments on a one inch encoder disk is about the largest number
that can be read robustly without the need for precise sensor
placement and alignment. Further experimentation with a two-sensor
quadrature implementation suggests that 15 black and white segments
might be more appropriate.
D. Making the Disks
We printed the encoder disks using
a simple postscript utility which I believe began it's life as a
posting on the SRS list server.
I do not know the original author. We are currently using fairly
thick matte-finish photo quality paper for the disks. It is thick
enough not to need any other backing to stay stiff, and does not
tend to absorb water over time and so resists warping.
%! Postscript utility for printing an encoder wheel
%
/inch {72 mul} def % #points/inch (don't change me)
/size 0.5 inch def % radius of encoder wheel
/segments 16 def % number of segments (black and white)
/angle 360 segments div def
/wedge
{ /radius exch def
/angle_s exch def
/angle_e exch def
newpath 0 0 moveto
0 0 radius angle_s angle_e arc
closepath
} def
gsave
1.0 inch 1.0 inch translate
0 1 segments {
360 segments div rotate
angle 0 size wedge
2 mod 0 eq {1} {0} ifelse
setgray fill
} for
grestore
showpage
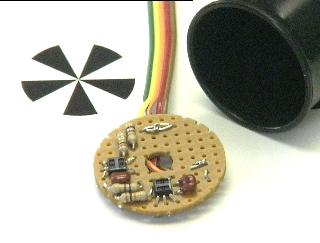
III. Construction:
The materials for the completed
shaft encoder consists of the paper encoder wheel, Hamamatsu
emitter/detector, black plastic film canister, and a cable tie. The
wheel is super-glued to the rear of the motor shaft. The Hamamatsu
is mounted on a small piece of perfboard with a couple of other
components. The perfboard is glued into the back of the film
canister with the leads exiting through a slot in the side. The
canister was cut down with an xacto knife and slotted to clear the
motor wires.
The cable tie allows the film canister to slide in and out to
adjust the exact distance for the Hamamatsu sensor. Then it is
tightened to hold it in place. This home-brew encoder requires no
machining and can be assembled with simple hand tools. It represents
an improvement over our previous encoders in that it is adjustable
and also has a light shield and protective cover over the encoder
wheel.
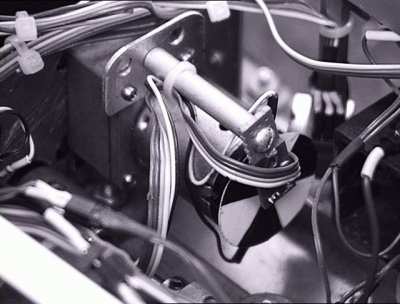
IV. Testing
We powered the motor from a DC bench supply
and connected the encoder to an O'scope to adjust the sensor
spacing. Once we were happy with the square wave thus generated we
tightened the cable tie to hold the film canister snugly in
place.
Next we dusted off an M.I.T.
6.270 robot controller board and wrote a simple piece of code to
read the encoder using the TIC3 interrupt of the HC11 processor,
printing the accumulated counts on the controller's LCD once per
second.
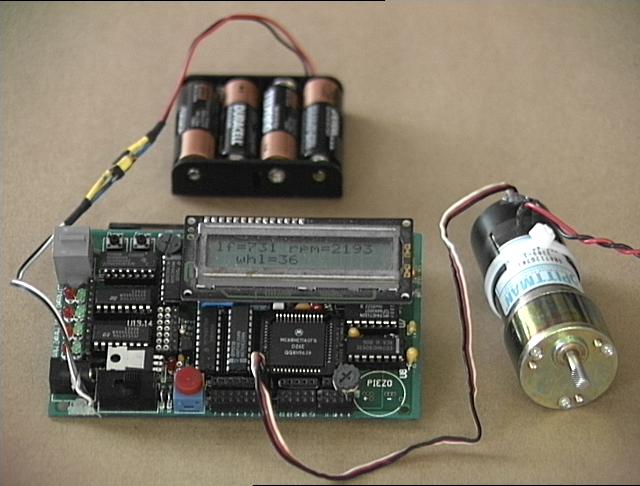
Home-brew encoder connected to an 68HC11
Timer-Input Compare port on the M.I.T.
6.270 Robot Controller board, similar to the "Handy Board".
The test setup is shown above. The motor is powered from a DC
bench supply not pictured. The LCD indicates that the encoder is
currently generating 731 counts per second, with a motor speed of
2193 RPM and a final output shaft speed of 36 RPM. Here is what we
measured:
Pittman GM8712 with 20 segment encoder. No-load
measurements
| Voltage (V) |
Current (A) |
Ticks per/sec |
Motor RPM |
Gearhead RPM |
| 19.1 |
1.4 |
2641 |
7941 |
132 |
| 15.0 |
1.4 |
2050 |
6156 |
102 |
| 12.5 |
1.3 |
1658 |
4980 |
82 |
| 10.0 |
1.2 |
1302 |
3906 |
65 |
| 7.5 |
1.15 |
936 |
2908 |
46 |
| 5.0 |
1.0 |
570 |
1710 |
28 |
| 4.0 |
1.0 |
434 |
1302 |
21 |
| 3.0 |
0.9 |
288 |
864 |
14 |
| 2.0 |
0.8 |
156 |
468 |
7 |
| 1.5 |
0.75 |
84 |
252 |
4 |
| 1.2 |
0.75 |
37 |
111 |
1 |
| 1.1 |
0.75 |
0 |
0 |
0 |
V. Quadrature Encoding:
These encoders are read very
robustly by the Hamamatsu P5587 IR emitter/detector unit sold by
Acroname and Zargos as previously discussed. A single unit can be
used to count encoder divisions for velocity information. That's all
the SR04 robot has. Two are required in order to read both velocity
and direction. This is what I'm hoping to implement for the new
platform.
Quadrature encoder is actually pretty simple in this case. The
two Hamamatsu's are mounted such that when one is "seeing" the edge
between a black and white segment, the other is centered in a
segment. The HC11 and similar processor have builtin hardware for
detecting edges and generating interrupts. The 68332 can do all of
this in hardware with "TPU" channels.
After a vigorous exchange of email it was determined that two
sensors mounted at right angles to each other will produce
quadrature signals for an ODD number of encoder white or black
segments. We turned a couple of pieces of perf-board a little
smaller than the diameter of the back of a film canister, about 1.15
inches.
Then we used the arrangement of the perf-board holes to get the
two sensors oriented at right angles. By making the disk fit snugly
in the film canister to which it is glued or screwed, the concentric
alignment of the sensors with the motor and encoder disk is
guaranteed. For test purposes we printed 22 segment (11 black and 11
white), 14 segment, and 10 segment encoder disks. The 14 and 10
segment disks seemed to give the best performance in terms of ease
of alignment of the two out-of-phase signals.
Twin sensors mounted at 90 degrees, a film
canister and an odd numbered encoder disk.
Using a dual-trace scope we aligned and calibrated the two
signals in the same manner as the single channel implementation. The
encoder software is only slightly more complex than for the single
channel case. Each time the A channel generates a interrupt the B
channel is sampled. For positive going edges ( black to white
transitions) the B channel will be centered on a black segment when
the motor is turning in one direction, and a white segment when it
is turning in the reverse direction. Negative going edges are just
the opposite. Thus the motor velocity and direction can be
determined.
Kipton Moravec of the DPRG suggests that this is best detected
with a simple state machine. He further reports, "A good one that
has already been reduced can be found on the Xilinx website. I have it
implemented in a macro in my Xilinx SW. The write-up can be found
at: http://www.xilinx.com/xapp/xapp012.pdf."
Robert Singleton proposes that a simple quadrature scheme can be
implemented using two sensors mounted in a line, by printing a 90
degree phase shift pattern on the encoder disk itself. He has
samples of this encoder disk and several others including binary and
graycode patterns at: http://www.linuxlegend.com/~slugmusk/encpix/.
Robert's quadrature pattern
Kipton has volunteered to design a simple PC board that can be
used as a single or quadrature mounting for one or two Hamamatsu's,
sized to fit in a film canister. Robert is evaluating a
Hewlett-Packard HEDR-8000. He describes it as a "surface mounted 8
pin (S08 package) device with all optics and electronics to read,
reflectively, a 75 or 150 line-per-inch pattern and provide a
quadrature output."
He directs the interested reader to go to the Hewlett-Packard
web page and look under Motion Control. Dan Creagan was also
inspired to mount home-brew encoders on his Pittman motors. His work
can be found at: http://academic1.bellevue.edu/robots/tanner/.
We have in the past built custom gear trains and shaft encoders
for our hobby robot motors. Home-brew gear trains are difficult to
fabricate and suitable gears from suppliers like Berg or SmallParts
are generally quite expensive. In our experience it is much easier
to find a motor with the appropriate electrical and mechnical
characteristics and add encoders. This design is by far the best
combination of simplicity and mechanical ruggedness to date. Thanks
again to the many DPRG and SRS list members who contributed data and
brain power to this on-going effort. | 
{kind=link}
{kind=link}